Description du robot Beebot.
Le robot peut garder en mémoire jusqu’à 40 mouvements. Si on ne clique pas sur le bouton « X » avant de rentrer un nouveau programme, il s’ajoute alors à la programmation précédente. Le robot avance de 15 cm à chaque déplacement, et pivote de 90° lors de ses rotations à droite et à gauche. Il émet des sons lorsque l’on le programme et à la fin de son trajet.
Ce robot s’utilise sur un tapis quadrillé dont les carrés font 15 cm de cotés. Il existe une infinité de tapis, car on peut le faire nous-même, ce qui en fait un outil adaptable à beaucoup d’activités et champs d’apprentissages. Cependant on trouve beaucoup de modèles déjà réalisés sur internet.
Il se recharge sur batterie.
Il faut investir une centaine d’euros pour un robot Beebot. Mais on peut en emprunter dans différents organismes (DSDEN, CANOPE,…).
Activités en classe avec Beebot.
Nous vous avons préparé une activité pour une classe de Grande Section.
Cette activité est inscrite dans une situation concrète où l’élève doit déplacer Beebot du parking à la fête foraine. Cela va l’aider à se représenter et se déplacer dans l’espace, notamment grâce à la modélisation du trajet par les doigts dans un premier temps puis à l’aide de carte de déplacement. L’activité permet également de travailler sur la notion de chronologie dans la succession des déplacements.
Lien avec les programmes :
→ Se repérer dans l’espace.
→ Ordonner une suite d’actions, s’initier à la programmation.
→ Intégrer la chronologie.
→ Utiliser un langage précis et adapté (avancer, reculer, pivoter à droite, pivoter à gauche…).
→ Savoir situer un objet par rapport à un autre (où se trouve l’abeille par rapport aux commerces, la plage…etc..).
En quoi l’utilisation du robot Beebot permet-elle la mise en activité des élèves ?
- Elle apporte du concret à la situation en faisant déplacer l’abeille sur le tapis pour l’amener à des points définis/stratégiques.
- Elle éveille la motivation des élèves qui leur permet la manipulation.
- Permet de tester, essayer, recommencer…
Objectifs de notre activité :
Concrétiser les déplacements au travers des cartes de déplacements pour aider à la programmation dans l’abeille.
Liens avec le SCCCC:
Domaine 1 : Langage pour penser et communiquer.
Domaine 2 : Des outils et méthodes pour apprendre.
Domaine 5 : Représentation du monde et de l’activité humaine.
Cette activité survient suite à la phase de manipulation libre, les élèves découvrent et manipulent l’abeille sans consignes. Cela leur a permis de découvrir l’effet produit par les différentes touches (avancer, reculer, pivoter, effacer …).
On propose aux élèves un tapis quadrillé qui représente une ville. C’est un travail en groupe de 4 élèves, ce qui renforce la cohésion et l’écoute des autres. La consigne est d’arriver à amener l’abeille de son point de départ (le parking) à un point d’arrivée (la fête foraine) définit par l’enseignant.
Pour les aider, ils ont à leur disposition des cartes de déplacement (avancer, reculer, pivoter droite/gauche) qui leur permettent de matérialiser les déplacements du robot Beebot. Cela les met dans une situation d’autocorrection leur permettant de visualiser le programme à rentrer dans le robot pour l’amener à son point final.
Au fur et à mesure, pour complexifier la programmation, on peut faire évoluer la situation et donner plusieurs points de passages obligatoires avant d’arriver au point final. On peut également leur demander d’établir plusieurs itinéraires pour arriver au même point.
Voici une vidéo de présentation de notre activité en classe.
Vidéo de présentation de notre activité en classe :
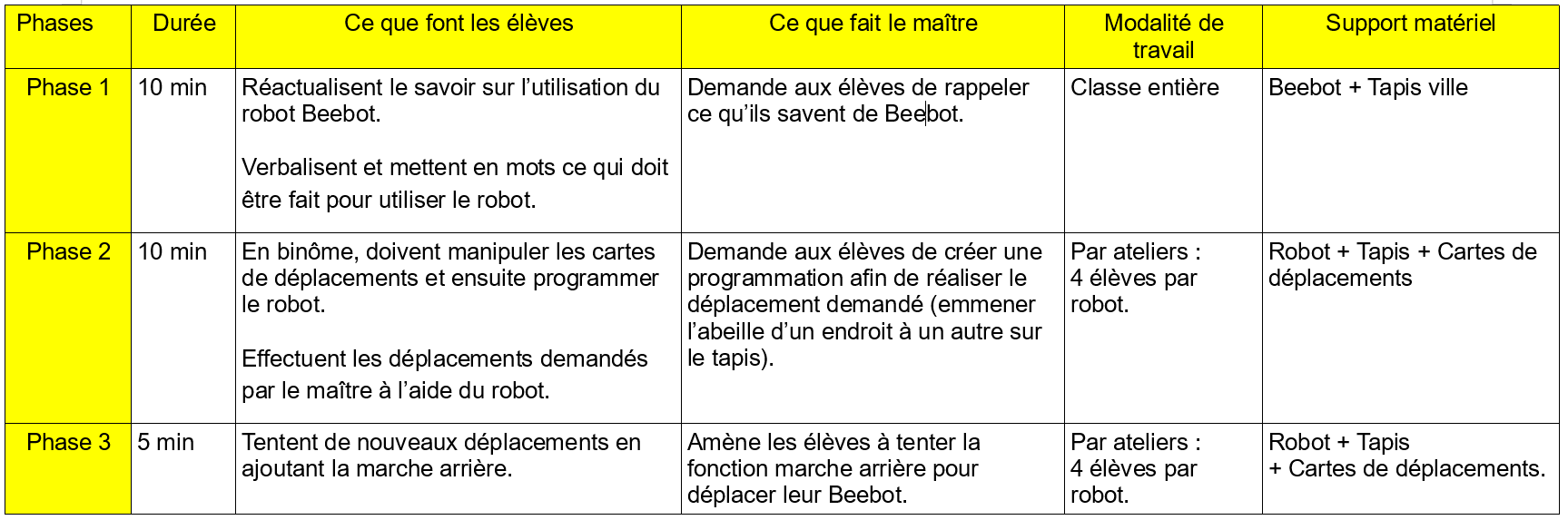
Fiche de préparation de la séance :