Thymio est un petit robot programmable avec des images, du texte ou un mélange des deux. Il existe donc différents niveaux de programmation, adaptables aux différents cycles :
- Le Langage de Programmation Visuel (VPL) fonctionne avec des blocs d’images et permet ainsi une première approche de la programmation.
- Le logiciel Blockly permettra d’établir une transition entre la programmation visuelle et la programmation textuelle, grâce à des blocs visuels qui ont le pouvoir de la programmation texte.
- Enfin, le logiciel Aseba Studio permettra une programmation entièrement textuelle, et offrira diverses possibilités (vérifier l’état du robot, création de graphiques…).

Le robot Thymio possède 5 touches tactiles, 5 capteurs de proximité avant, 2 capteurs de proximité arrière, 2 capteurs de sol, un capteur de température, un accéléromètre à 3 axes, un récepteur de commande infrarouge et un microphone. Il possède 6 comportements pré-programmés, que vous pourrez découvrir dans notre vidéo de présentation:
- en jaune, il est explorateur: il évite les obstacles
- en vert, il est amical: il suit une main ou un objet
- en rouge, il est peureux: il fuit
- en bleu clair, il est inspecteur: il suit une piste
- en bleu foncé, il est attentif: il réagit aux sons
- en rose, il est obéissant: il suit les ordres donnés par les boutons ou la télécommande
Nous avons envisagé une séquence de découverte de la programmation au travers de l’utilisation du robot Thymio, pour une classe de cycle 3. Les différentes activités s’effectueront par petits groupes, et permettront aux élèves de manipuler le robot, ainsi que différents logiciels de programmation. Dans un premier temps, les élèves découvrent le robot ainsi que le logiciel en explorant les comportements et les modes de programmation. Dans un second temps, les élèves peuvent programmer des minis parcours, pour terminer la séquence en programmant un parcours entier en lien avec le thème du code de la route.
La tâche finale envisagée est donc la construction d’un parcours routier, présentant un point de départ et un point d’arrivée. Les élèves seront amenés à établir un programme pour guider le robot à travers ce parcours.

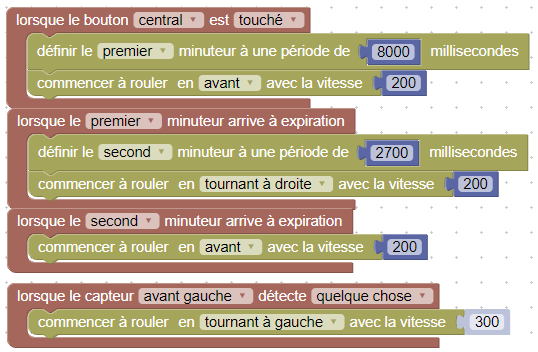
Nous présentons ci-dessous un exemple de ce que les élèves pourraient être amenés à programmer:
Vidéo de présentation du robot et de notre projet pédagogique:


